
Robotics & Artificial Intelligence
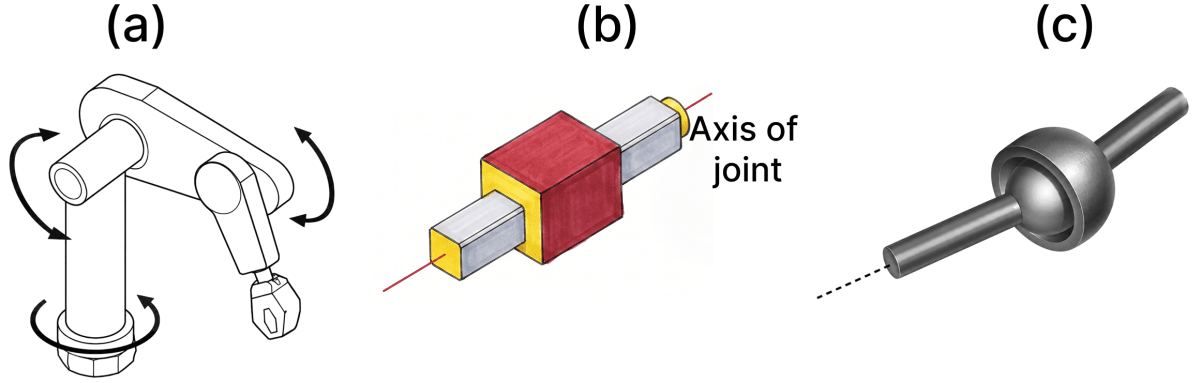
Name the following joints with the reference to robotics:
Robotics Concepts
2 Likes
Answer
(a) Revolute Joint
(b) Prismatic Joint
(c) Spherical Joint
Answered By
3 Likes
Related Questions
State whether the following statements are True or False:
- Revolute joints allow a robot to rotate a part around a single axis, enabling angular movement, typically measured in degrees.
- Soft links maintain the overall shape and strength of the robot, which is crucial for supporting weight and handling various tasks.
- The angular motion systems often incorporate guide rails to ensure smooth, straight movement and prevent lateral deviations.
- Circular motion refers to as the movement of a robot along a curved or circular path around a fixed point or axis.
- Spherical joint allows the links of a robot to move linearly along an axis without rotating.
- The DoF of a joint indicates the number of independent axes along which motion is allowed.
Name the following with the reference to robotics:
- Three types of motions:
(a) ……………
(b) ……………
(c) …………… - Three types of joints:
(a) ……………
(b) ……………
(c) …………… - Two types of links:
(a) ……………
(b) ……………
- Three types of motions:
Assertion (A): In robotics, the soft link refers to as the flexible or elastic connection between different parts of a robot.
Reason (R): The soft links can bend, stretch or compress, giving robots greater adaptability and compliance, especially in tasks involving interaction with unpredictable environments.
Based on the above discussion, choose an appropriate statement from the options given below:
- Both A and R are true and R is the correct explanation of A.
- Both A and R are true and R is not the correct explanation of A.
- A is true but R is false.
- A is false but R is true.
- Both A and R are false.
Motion in a robot refers to as the movement capabilities that allow it to navigate and interact with its environment. It comprises various types of motion depending on its design and purpose. The following are some statements which are concerned with various types of motions applied in robotics.
Read these statements and identify the types of motions used in robots.
(a) In this motion, the robot moves around a central axis, either internal (like a robot arm rotating at the base) or external (moving around an object or location).
(b) This motion is a fundamental aspect of robotic design and functionality. The movement occurs in a straight line which can be horizontal, vertical or diagonal.
(c) This motion involves changes in the angle between two connected components, such as between the segments of a robotic arm or a robot's joints.