
Robotics & Artificial Intelligence
If a simple robotic arm is having with three revolute joints, then how many degrees of freedom will it have?
- three
- four
- five
- six
Robotics Concepts
3 Likes
Answer
three
Reason — Each revolute joint provides one degree of freedom, allowing rotation around a single axis. Therefore, a simple robotic arm with three revolute joints will have three degrees of freedom, meaning it can rotate in three different directions.
Answered By
2 Likes
Related Questions
How many degrees of freedom does the following figure have?
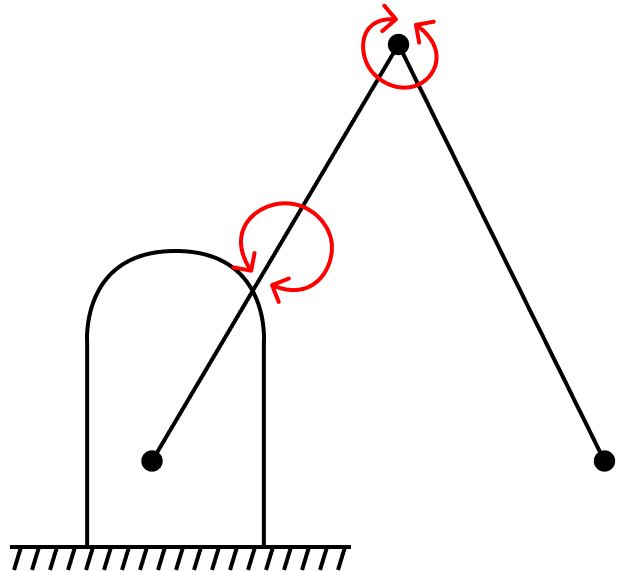
- two
- three
- four
- six
Which of the following is not related to degree of freedom that provide the ability to robots to rotate and change orientation freely?
- pitch
- yaw
- roll
- swing
Fill in the blanks:
- The …………… of Industrial Robots deals with the assembling of various components of a robot.
- …………… motion refers to the movement of a robot in a plane, allowing it to travel along both the X and Y axes simultaneously.
- The movement of …………… motion occurs in a straight line, which can be horizontal, vertical or diagonal.
- …………… links are solid components that do not bend or compress, providing stability and consistency in motion.
- …………… joint provides a single degree of freedom, allowing movement in one linear direction.
- Each revolute joint has one degree of freedom, meaning it provides rotation around only …………… axis (horizontal or vertical).
State whether the following statements are True or False:
- Revolute joints allow a robot to rotate a part around a single axis, enabling angular movement, typically measured in degrees.
- Soft links maintain the overall shape and strength of the robot, which is crucial for supporting weight and handling various tasks.
- The angular motion systems often incorporate guide rails to ensure smooth, straight movement and prevent lateral deviations.
- Circular motion refers to as the movement of a robot along a curved or circular path around a fixed point or axis.
- Spherical joint allows the links of a robot to move linearly along an axis without rotating.
- The DoF of a joint indicates the number of independent axes along which motion is allowed.